
Электрическим исполнительным механизмом в системах управления обычно называют устройство, предназначенное для перемещения рабочего органа в соответствии с сигналами, поступающими от управляющего устройства.
Рабочими органами могут быть различного рода дроссельные заслонки, клапаны, задвижки, шиберы, направляющие аппараты и другие регулирующие и запорные органы, способные производить изменение количества энергии или рабочего вещества, поступающего в объект управления. При этом перемещение рабочих органов может быть как поступательным, так и вращательным в пределах одного или нескольких оборотов. Следовательно, исполнительный механизм с помощью рабочего органа осуществляет непосредственное воздействие на управляемый объект.
В общем случае электрический исполнительный механизм состоит из электропривода, редуктора, узла обратной связи, датчика указателя положения выходного элемента и конечных выключателей.
В качестве электропривода в исполнительных механизмах используются либо электромагниты, либо электродвигатели с понижающим редуктором для снижения скорости перемещения выходного элемента до величины, обеспечивающей возможность непосредственного соединения этого элемента (вала или штока) с рабочим органом.
Узлы обратной связи предназначены для введения в контур регулирования воздействия, пропорционального величине перемещения выходного элемента исполнительного механизма, а следовательно, и сочлененного с ним рабочего органа. С помощью конечных выключателей производится отключение электропривода исполнительного механизма при достижении рабочим органом своих конечных положений во избежание возможных повреждений механических звеньев, а также для ограничения перемещения рабочего органа.
Как правило, мощность сигнала, вырабатываемого регулирующим устройством, бывает недостаточной для непосредственного перемещения рабочего органа, поэтому исполнительный механизм можно рассматривать как усилитель мощности, в котором слабый входной сигнал, усиливаясь во много раз, передается на рабочий орган.
Все электрические исполнительные механизмы, нашедшие широкое применение в самых различных отраслях современной техники автоматизации производственных процессов, можно разделить на две основные группы:
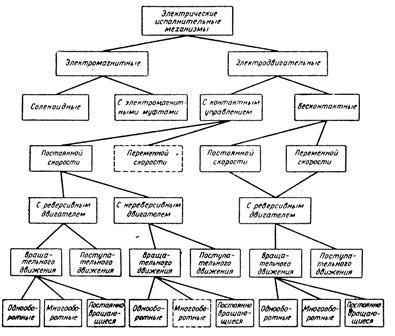
Классификация электрических исполнительных механизмов
К первой группе относятся прежде всего соленоидные электроприводы, предназначенные для управления различного рода регулирующими и запорными клапанами, вентилями, золотниками и т. п. Сюда же можно отнести исполнительные механизмы с различными видами электромагнитных муфт. Характерная особенность электрических исполнительных механизмов этой группы состоит в том, что необходимое для перестановки рабочего органа усилие создается за счет электромагнита, являющегося неотъемлемой частью исполнительного механизма.
Для целей регулирования соленоидные механизмы обычно применяются только в системах двухпозиционного регулирования. В системах автоматического управления в качестве исполнительных элементов часто используются электромагнитные муфты, которые подразделяются на муфты трения и муфты скольжения.
Ко второй, наиболее распространенной в настоящее время группе относятся электрические исполнительные механизмы с электродвигателями различных типов и конструкций.
Электродвигательные исполнительные механизмы
обычно состоят из двигателя, редуктора и тормоза (последнего иногда может и не быть). Сигнал управления поступает одновременно к двигателю и тормозу, механизм растормаживается и двигатель приводит в движение выходной орган. При исчезновении сигнала двигатель выключается, а тормоз останавливает механизм. Простота схемы, малое число элементов, участвующих в формировании регулирующего воздействия, и высокие эксплуатационные свойства сделали исполнительные механизмы с управляемыми двигателями основой для создания исполнительных устройств современных промышленных систем автоматического регулирования.
Существуют, хотя и не получили широкого распространения, исполнительные механизмы с неуправляемыми двигателями, которые содержат управляемую электрическим сигналом механическую, электрическую либо гидравлическую муфту. Характерной их особенностью является то, что двигатель в них работает непрерывно все время работы системы регулирования, а сигнал управления от регулирующего прибора передается рабочему органу через управляемую муфту
Исполнительные механизмы с управляемыми двигателями в свою очередь можно разделить по способу построения системы управления на механизмы с контактным и бесконтактным управлением.
Включение, отключение и реверсирование электродвигателей исполнительных механизмов с контактным управлением производится с помощью различной релейной или контактной аппаратуры. Это определяет основную отличительную особенность исполнительных механизмов с контактным управлением: у таких механизмов скорость выходного органа не зависит от величины управляющего сигнала, подаваемого на вход исполнительного устройства, а направление перемещения определяется знаком (или фазой) этого сигнала. Поэтому исполнительные механизмы с контактным управлением относят обычно к исполнительным устройствам с постоянной скоростью перемещения рабочего органа.
Для получения средней переменной скорости перемещения выходного органа исполнительного механизма при контактном управлении широко используется импульсный режим работы его электродвигателя.
В большинстве исполнительных механизмов, предназначенных для работы в схемах с контактным управлением, используются реверсивные электродвигатели. Применение электродвигателей вращающихся только в одну сторону, весьма ограничено, но все же имеет место.
Бесконтактные электрические исполнительные механизмы отличаются повышенной надежностью и позволяющие относительно просто получать как постоянную, так и переменную скорость перемещения выходного органа. Для бесконтактного управления исполнительными механизмами используются электронные, магнитные или полупроводниковые усилители, а также их сочетание. При работе управляющих усилителей в релейном режиме скорость перемещения выходного органа исполнительных механизмов постоянна.
Как электрические исполнительные механизмы с контактным управлением, так и бесконтактные можно подразделять также по следующим признакам.
По назначению:
По характеру действия:
По исполнению:
Выходной вал однооборотных исполнительных механизмов может вращаться в пределах одного полного оборота. Такие механизмы характеризуются величиной крутящего момента на выходном валу и временем его полного оборота.
В отличие от однооборотных многооборотные механизмы, выходной вал которых может осуществлять перемещение в пределах нескольких, иногда значительного количества, оборотов, характеризуются также полным числом оборотов выходного вала.

Прямоходные механизмы имеют поступательное движение выходного штока и оцениваются усилием на штоке, величиной полного хода штока, временем его перемещения на участке полного хода и по скорости движения выходного органа в оборотах в минуту для однооборотных и многооборотных и в миллиметрах в секунду для прямоходных механизмов.
Конструкция исполнительных механизмов позиционного действия такова, что с их помощью рабочие органы можно устанавливать только в определенные фиксированные положения. Чаще всего таких положений бывает два: «открыто» и «закрыто». В общем случае возможно существование и многопозиционных механизмов. Исполнительные механизмы позиционного действия обычно не имеют устройств для получения сигнала обратной связи по положению выходного органа.
Исполнительные механизмы пропорционального действия конструктивно таковы, что обеспечивают в заданных пределах установку рабочего органа в любое промежуточное положение в зависимости от величины и длительности управляющего сигнала. Подобные исполнительные механизмы могут использоваться как в позиционных, так и в П, ПИ и ПИД-системах автоматического регулирования.
Существование электрических исполнительных механизмов как нормального, так и специальных исполнений в значительной мере расширяет возможные области их практического применения.
Никто пока не комментировал эту страницу.